Algumas grandezas físicas apenas se representam por um número e uma unidade de medida, sendo suficientes para entender a informação transmitida. Um exemplo é a massa: se é dito que alguém possui 60 kg, já está entendido, não é necessário mais informações para entender a medida que foi feita. Estas são as chamadas grandezas escalares, as quais um número e uma unidade de medida já lhe bastam.
Contudo, existem grandezas físicas que exigem um pouco mais de informações. Tomamos como exemplo o deslocamento: dizer que "um carro está a 30 km" não esclarece o fato, pois surgem perguntas sobre qual seria a exata localização, a qual o carro está distante 30 km, se ele está indo ou voltando deste local, enfim, é necessária uma orientação para esclarecer a medida. Estes tipos de grandezas físicas são as grandezas vetoriais. Elas exigem, além do número e a unidade de medida, de uma orientação, ou seja, direção e sentido.
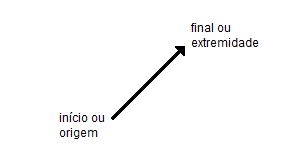
Um vetor é representado geometricamente por uma seta, cujo início e final são mostrados na figura a seguir.
Desta forma, são definidas, na tabela abaixo, algumas direções e sentidos como exemplos para representar um vetor.
| Direção | Sentido | Vetor |
| vertical | para cima | ↑ |
| vertical | para baixo | ↓ |
| horizontal | esquerda | ← |
| horizontal | direita | → |
| a 45º da horizontal | anti-horário (nordeste) |
↗ |
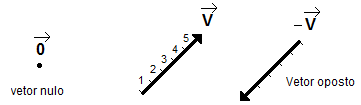
O vetor oposto é aquele que possui o sentido contrário a um determinado vetor na mesma direção. Na tabela, o primeiro e o segundo vetor são opostos. O terceiro e o quarto vetor também são.
O vetor nulo é representado por um ponto, pois não há dimensão para este vetor, sendo que seu início coincide com seu fim. Um vetor não nulo possui dimensão (ou módulo). A dimensão é o número que determina a quantidade na grandeza (número 5 no exemplo a seguir). Uma grandeza vetorial, velocidade v, por exemplo, é representada com uma flecha acima da letra v. Observe o exemplo seguinte.
A velocidade de 5 m/s possui dimensão ou módulo igual a 5.
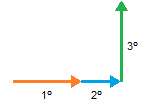
A soma de vetores é feita conforme os passos:
1) colocam-se os vetores a serem somados na ordem: a origem do segundo vetor no final do primeiro, a origem do terceiro vetor no final do segundo, assim por diante;
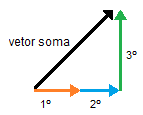
2) o vetor soma será o vetor que liga a origem do primeiro vetor com o final do último vetor, neste caso, o último é o terceiro.
Quando um dos vetores for oposto na soma, unirá o final do segundo com o final do primeiro, ou início do segundo com o início do primeiro (ver caso 180º na tabela adiante).
Veja na tabela abaixo três tipos de operações comuns com vetores.
| Ângulo entre os vetores | Operação | Vetor Soma |
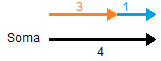
| 0º | Soma
(3 + 1 = 4) |
 |
| 90º | Teorema de Pitágoras
soma² = 3² + 4² |
 |
| 180º | subtração (o vetor oposto 1 é negativo) (3 – 1 = 2) |
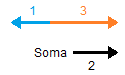 |
Quando for um ângulo qualquer (α) entre os vetores a serem somados, utiliza-se a regra do paralelogramo. Nesta regra, colocam-se os vetores na ordem de soma. O vetor que fecha é o vetor soma (diagonal do paralelogramo). Veja a figura e a equação para o caso da soma de dois vetores:
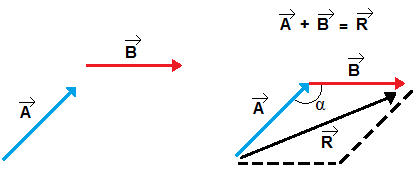
Pela Lei dos Cossenos:

Todo vetor em um plano pode ser representado por suas componentes. Vamos imaginar uma situação para que fique claro este conceito. Suponhamos que uma pessoa, que está no ponto A em uma praça, deseja chegar no ponto C, na mesma praça. Ela pode fazer este caminho pelas laterais da praça ou pela diagonal que une diretamente os dois pontos A e C. Inclusive, está é uma característica importante dos vetores: unir dois pontos de forma direta, pelo menor caminho, sem fazer curvas ou desvios!
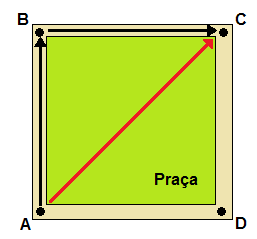
Assim, são três os caminhos que poderiam ser feitos, de acordo com a figura, se levarmos em conta apenas os pontos A, B, C e D: o segmento AB mais o segmento BC, o segmento AD mais o segmento DC e, diretamente, o segmento AC.
Quando falamos de componentes de vetores, temos
- 1) segmento AB (ou DC): componente vertical (no eixo y) do vetor AC.
- 2) segmento BC (ou AD): componente horizontal (no eixo x) do vetor AC.
Isso ocorre com qualquer vetor em um plano. Se o vetor estiver em um espaço tridimensional, serão três componentes, em x, y e z, no espaço cartesiano. As componentes de um vetor também são chamadas de projeções deste vetor, nos respectivos planos cartesianos.
Texto originalmente publicado em https://www.infoescola.com/fisica/grandeza-vetorial/